SCARA රොබෝ අත - Z-Arm-4160B සහයෝගී රොබෝ අත





ප්රධාන කාණ්ඩය
කාර්මික රොබෝ අත / සහයෝගී රොබෝ අත / විදුලි ග්රිපර් / බුද්ධිමත් ක්රියාකරු / ස්වයංක්රීයකරණ විසඳුම්
අයදුම්පත
SCIC Z-Arm cobots යනු ඇතුළත ධාවක මෝටරයක් සහිත සැහැල්ලු 4-අක්ෂ සහයෝගී රොබෝවරුන් වන අතර, අනෙකුත් සාම්ප්රදායික ස්කාරා මෙන් අඩු කරන්නන් තවදුරටත් අවශ්ය නොවන අතර එමඟින් පිරිවැය 40% කින් අඩු වේ. SCIC Z-Arm cobots හට ත්රිමාණ මුද්රණය, ද්රව්ය හැසිරවීම, වෙල්ඩින් සහ ලේසර් කැටයම් ඇතුළු කාර්යයන් සාක්ෂාත් කරගත හැකිය. එය ඔබේ කාර්යයේ සහ නිෂ්පාදනයේ කාර්යක්ෂමතාව සහ නම්යශීලීභාවය බෙහෙවින් වැඩි දියුණු කිරීමට සමත් වේ.
විශේෂාංග

ඉහළ නිරවද්යතාවය
පුනරාවර්තන හැකියාව
±0.02මි.මී.
අභිරුචිකරණය කළ Z-අක්ෂය
මීටර් 0.1-0.8
විශාල බරක්
බර කිලෝග්රෑම් 4 යි
උපරිම 5kg
වැඩි වේගය
උපරිම රේඛීය වේගය 2m/s
(නැවතුම් බර කිලෝග්රෑම් 5)
විශාල අත් පරතරය, ඉහළ නිරවද්යතාවය 4-අක්ෂ රොබෝ අතක්, භාවිතයට පහසුය
ඉහළ නිරවද්යතාවය
පුනරාවර්තන හැකියාව: ± 0.02mm
විශාල අත් පරතරය
J1-අක්ෂය: 325මි.මී.,J2-අක්ෂය: 275 මි.මී.
අභිරුචිකරණය කළ Z-අක්ෂය
ඉහළ-පහළ පහර 0.1m-0.8m අතර අභිරුචිකරණය කළ හැකිය
ඉඩ ඉතිරි කිරීම
ධාවකය/පාලකය තිළැලිව ඇත
සරල සහ භාවිතා කිරීමට පහසුය
රොබෝ අත නොදැන සිටි නවකයාට එය භාවිතා කිරීමද පහසුය, අතුරු මුහුණත විවෘත වෙමින් පවතී.
අධික වේගය
කිලෝග්රෑම් 4 ක බරක් යටතේ එහි වේගය තත්පරයට 2000mm වේ.

ආශ්රිත නිෂ්පාදන



පිරිවිතර පරාමිතිය
SCIC Hitbot Z-Arm 4160B නිර්මාණය කර ඇත්තේ SCIC Tech විසිනි, එය සැහැල්ලු සහයෝගී රොබෝවකි, වැඩසටහන්ගත කිරීමට සහ භාවිතා කිරීමට පහසුය, SDK සඳහා සහය දක්වයි. ඊට අමතරව, එය ගැටුම් හඳුනාගැනීමේ සහය දක්වයි, එනම්, මිනිසුන් ස්පර්ශ කරන විට නතර කිරීම ස්වයංක්රීය වනු ඇත, එය ස්මාර්ට් මිනිස්-යන්ත්ර සහයෝගීතාවයකි, ආරක්ෂාව ඉහළයි.
| Z-Arm 4160B සහයෝගී රොබෝ අත | පරාමිතීන් |
| 1 අක්ෂ බාහු දිග | 325 මි.මී |
| 1 අක්ෂ භ්රමණ කෝණය | ±90° |
| අක්ෂ 2 බාහු දිග | 275 මි.මී |
| 2 අක්ෂ භ්රමණ කෝණය | ±164° විකල්ප: 15-345අංශක |
| Z අක්ෂ පහර | 410 උස අභිරුචිකරණය කළ හැකිය |
| R අක්ෂ භ්රමණ පරාසය | ±1080° |
| රේඛීය වේගය | 2000mm/s (පැටවුම් බර 4kg) |
| පුනරාවර්තන හැකියාව | ±0.02මි.මී. |
| සම්මත බර පැටවීම | කිලෝග්රෑම් 4 යි |
| උපරිම බර පැටවීම | කිලෝග්රෑම් 5 යි |
| නිදහසේ උපාධිය | 4 |
| බල සැපයුම | 220V/110V50-60HZ 48VDC උපරිම බලය 960W ට අනුවර්තනය වේ |
| සන්නිවේදනය | ඊතර්නෙට් |
| ප්රසාරණය වීමේ හැකියාව | ඒකාබද්ධ චලන පාලකය 24 I/O + අත යට ප්රසාරණය සපයයි. |
| Z-අක්ෂය උසින් අභිරුචිකරණය කළ හැකිය | මීටර් 0.1~මීටර් 0.8 |
| Z-අක්ෂය ඇදගෙන යාම ඉගැන්වීම | / |
| විද්යුත් අතුරුමුහුණත වෙන් කර ඇත | සම්මත වින්යාසය: සොකට් පැනලයේ සිට පහළ බාහු ආවරණය හරහා අඟල් 24*23 (ආවරණයක් නොමැති) වයර් විකල්ප: සොකට් පැනලය සහ ෆ්ලැන්ජ් හරහා 2 φ4 රික්ත නල |
| අනුකූල HITBOT විදුලි ග්රිපර්ස් | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 හඳුන්වා දීම |
| හුස්ම ගැනීමේ ආලෝකය | / |
| දෙවන අතෙහි චලන පරාසය | සම්මත: ±164° විකල්ප: 15-345deg |
| විකල්ප උපාංග | / |
| පරිසරය භාවිතා කරන්න | පරිසර උෂ්ණත්වය: 0-45°C ආර්ද්රතාවය: 20-80% ආර්ද්රතාවය (තුහින නැත) |
| I/O port ඩිජිටල් ආදානය (හුදකලා) | 9+3+ඉදිරිපස දිගුව (විකල්ප) |
| I/O port ඩිජිටල් ප්රතිදානය (හුදකලා) | 9+3+ඉදිරිපස දිගුව (විකල්ප) |
| I/O port ඇනලොග් ආදානය (4-20mA) | / |
| I/O port ඇනලොග් ප්රතිදානය (4-20mA) | / |
| රොබෝ අත උස | 860 මි.මී |
| රොබෝ අතක බර | 410mm පහර ශුද්ධ බර 36.5kg |
| පාදක ප්රමාණය | 250මි.මී.*250මි.මී.*15මි.මී. |
| පාදම සවි කිරීමේ සිදුරු අතර දුර | M8*20 ඉස්කුරුප්පු හතරක් සහිත 200mm*200mm |
| ගැටීම් අනාවරණය | √ අයිතමය |
| ඇදගෙන යාම ඉගැන්වීම | √ අයිතමය |
සැහැල්ලු එකලස් කිරීමේ කාර්යයන් සඳහා කදිම තේරීමක්
Z-Arm XX60B යනු අක්ෂ 4 කින් යුත් රොබෝ අතක් වන අතර එය විශාල අත් පරතරයක් ඇති අතර කුඩා ප්රදේශයක් අල්ලාගෙන වැඩ කරන ස්ථානයක හෝ ඇතුළත යන්ත්රයක තැබීමට ඉතා සුදුසුය, එය සැහැල්ලු එකලස් කිරීමේ කාර්යය සඳහා කදිම තේරීමකි.


විශාල භ්රමණ කෝණයක් සහිත සැහැල්ලු බර

නිෂ්පාදන බර කිලෝග්රෑම් 36.5 ක් පමණ වන අතර, එහි උපරිම බර කිලෝග්රෑම් 5 දක්වා විය හැකිය, 1-අක්ෂයේ භ්රමණ දූතයා ± 90° වේ, 2-අක්ෂයේ භ්රමණ කෝණය ± 164° වේ, R-අක්ෂයේ භ්රමණ පරාසය ± 1080° දක්වා විය හැකිය.
විශාල අත් පරතරය, පුළුල් යෙදුම

Z-Arm XX60B හි දිගු අත් පරතරයක් ඇත, 1-අක්ෂයේ දිග 325mm, 2-අක්ෂයේ දිග 275mm, එහි රේඛීය වේගය 4kg බරක් යටතේ 2000mm/s දක්වා විය හැකිය.


යෙදවීමට නම්යශීලී, මාරු වීමට වේගවත්
Z-Arm XX60B සැහැල්ලු, ඉඩ ඉතිරි කර ගත හැකි සහ යෙදවීමට නම්යශීලී ලක්ෂණ ඇත, එය බොහෝ යෙදුම්වල යෙදවීමට සුදුසු වන අතර, එය පෙර නිෂ්පාදන පිරිසැලසුම වෙනස් නොකරනු ඇත, වේගයෙන් මාරු කළ හැකි ක්රියාවලි අනුපිළිවෙල සහ කුඩා නිෂ්පාදන කාණ්ඩයක් සම්පූර්ණ කිරීම යනාදිය ඇතුළුව.
වැඩසටහන සම්පූර්ණ කිරීමට DragTeaching

මෙම මෘදුකාංගය ග්රැෆික් නිර්මාණය මත පදනම් වූවක් වන අතර, එය ලක්ෂ්යය, ප්රතිදාන සංඥාව, විදුලි ග්රිපර්, තැටි, ප්රමාද වූ, උප-ක්රියාවලි, යළි පිහිටුවීම සහ අනෙකුත් මූලික ක්රියාකාරී මොඩියුලය සපයා ඇත, පරිශීලකයින්ට ක්රමලේඛන ප්රදේශයේ රොබෝ අත පාලනය කිරීමට මොඩියුලය ඇදගෙන යා හැකිය, අතුරුමුහුණත සරලයි, නමුත් ක්රියාකාරිත්වය බලවත් ය.
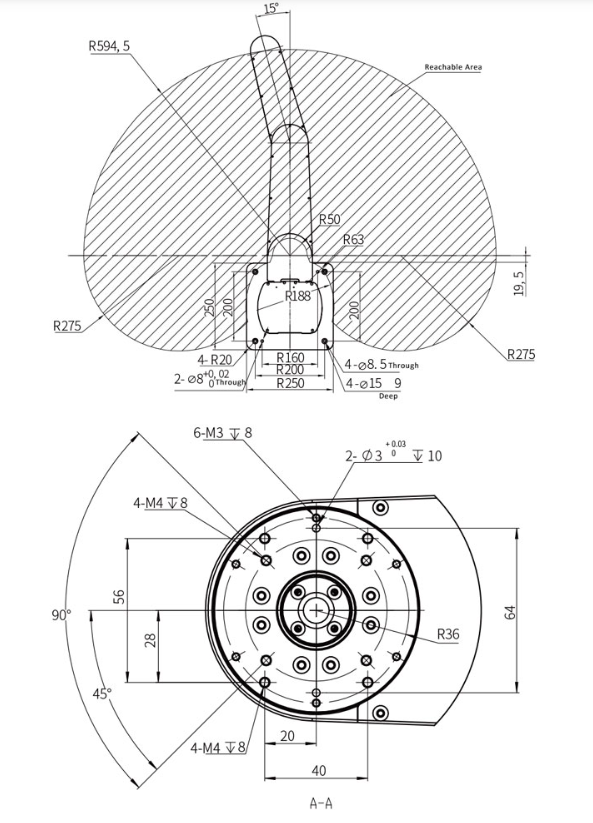
චලන පරාසය M1 අනුවාදය (පිටතට කරකවන්න)
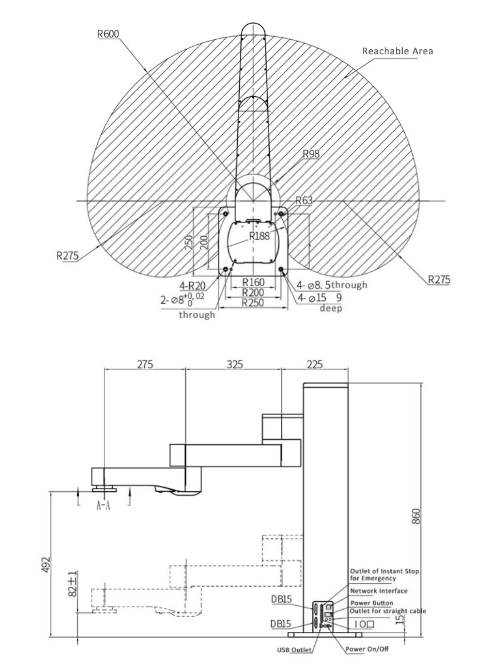
DB15 සම්බන්ධක නිර්දේශය

නිර්දේශිත මාදිලිය: ABS කවචය සහිත රන් ආලේපිත පිරිමි YL-SCD-15M ABS කවචය සහිත රන් ආලේපිත ගැහැණු YL-SCD-15F
ප්රමාණය විස්තරය: 55mm*43mm*16mm
(රූපය 5 බලන්න)
රොබෝ අතෙහි බාහිර භාවිත පරිසරයේ රූප සටහන

අපගේ ව්යාපාරය






