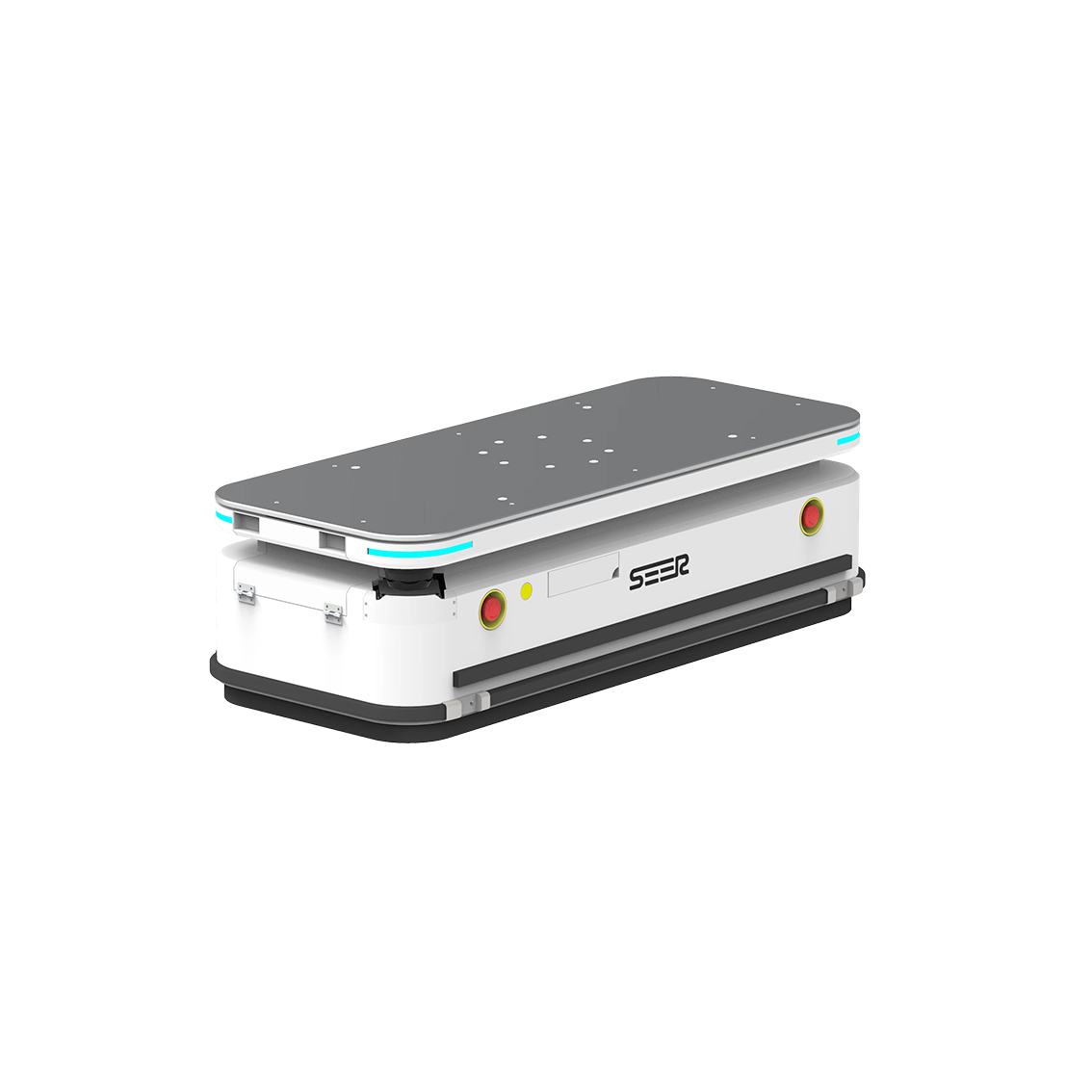
ජැකින් රොබෝවරු - ඔම්නි-දිශානුගත එසවුම් රොබෝ SJV-W600DS-DL
ප්රධාන කාණ්ඩය
AGV AMR / ජැක් අප් එසවුම් AGV AMR / AGV ස්වයංක්රීය මඟ පෙන්වන වාහනය / AMR ස්වයංක්රීය ජංගම රොබෝ / කාර්මික ද්රව්ය හැසිරවීම සඳහා AGV AMR මෝටර් රථය / චීන නිෂ්පාදක AGV රොබෝ / ගබඩාව AMR / AMR ජැක් අප් එසවුම් ලේසර් SLAM සංචලනය / AGV AMR ජංගම රොබෝ / AGV AMR චැසි ලේසර් SLAM සංචලනය / බුද්ධිමත් සැපයුම් රොබෝ
අයදුම්පත

agv ස්වයංක්රීය වාහන සඳහා AMB (Auto Mobile Base) මාලාවක්, agv ස්වයංක්රීය මඟ පෙන්වන වාහන සඳහා නිර්මාණය කර ඇති විශ්වීය චැසියක්, සිතියම් සංස්කරණය සහ ප්රාදේශීයකරණ සංචාලනය වැනි විශේෂාංග කිහිපයක් සපයයි. agv කරත්තය සඳහා මෙම මිනිසුන් රහිත චැසිය, agv ස්වයංක්රීය වාහන නිෂ්පාදනය සහ යෙදීම ඉක්මනින් සම්පූර්ණ කිරීමට පරිශීලකයින්ට උපකාර කිරීම සඳහා බලවත් සේවාදායක මෘදුකාංග සහ යැවීමේ පද්ධති සමඟ විවිධ ඉහළ මොඩියුල සවි කිරීමට I/O සහ CAN වැනි බහුල ප්රමාණයේ අතුරුමුහුණත් සපයයි. agv ස්වයංක්රීය මඟ පෙන්වන වාහන සඳහා AMB ශ්රේණියේ මිනිසුන් රහිත චැසියේ මුදුනේ සවි කිරීමේ සිදුරු හතරක් ඇත, එය එක් චැසියක බහු යෙදුම් සාක්ෂාත් කර ගැනීම සඳහා ජැකින්, රෝලර්, හැසිරවීම්, ගුප්ත කම්පනය, සංදර්ශකය යනාදිය සමඟ අත්තනෝමතික ප්රසාරණයට සහාය වේ. SEER ව්යවසාය වැඩිදියුණු කළ ඩිජිටල්කරණය සමඟ AMB එක්ව එකවර AMB නිෂ්පාදන සිය ගණනක් ඒකාබද්ධ යැවීම සහ යෙදවීම සාක්ෂාත් කර ගත හැකි අතර, එමඟින් කර්මාන්ත ශාලාවේ අභ්යන්තර සැපයුම් සහ ප්රවාහනයේ බුද්ධිමත් මට්ටම බෙහෙවින් වැඩි දියුණු වේ.
විශේෂාංගය
· ශ්රේණිගත කළ බර: 600kg
· ධාවන කාලය: පැය 6.5
· ලිඩාර් අංකය: 2
· භ්රමණ විෂ්කම්භය: 1322mm
· සංචාලන වේගය: ≤1.2m/s
· ස්ථානගත කිරීමේ නිරවද්යතාවය: ±5,±0.5mm
● බහු සංචාලන විකල්ප තිබේ
ලේසර් SLAM සහ QR කේත සංචාලනය නිදහසේ සහ පහසුවෙන් යෙදවිය හැකි අතර, බහු අවස්ථා සහ විවිධ නිරවද්යතාවයේ අවශ්යතා සපුරාලයි.
● වඩාත් නම්යශීලී සර්ව දිශානුගත චලිතය
සර්ව දිශානුගත චලන ආකෘතිය මඟින් අසීමිත චලනයකට සහ අවස්ථා වලදී අඩු සීමා කිරීම් වලට ඉඩ සලසයි.
● ආරක්ෂක ආරක්ෂාව
LIDAR + Safe edge හරහා සර්ව සම්පූර්ණ ආරක්ෂාව.
● කාර්යක්ෂම සහ බුද්ධිමත්
ගැඹුරු ව්යාපාර කළමනාකරණය සහ ප්රශස්තිකරණය සඳහා කාලසටහන සහ ගබඩා පද්ධති බාධාවකින් තොරව ප්රවේශ විය හැක.
විවිධ පටු අන්තරාල සඳහා 546 mm සිහින් නිර්මාණයක්.
● ඉහළ බර ධාරිතාවක් සහ දිගු බැටරි ආයු කාලයක්
ඉහළ කාර්යසාධනයක් සහිත බර ධාරිතාව කිලෝග්රෑම් 600 ක බරක් සහ පැය 6.5 ක බැටරි ආයු කාලයක් සඳහා සහය දක්වයි.
ආශ්රිත නිෂ්පාදන



පිරිවිතර පරාමිතිය
| නිෂ්පාදන නාමය | SJV-SW500 හඳුන්වා දීම | SJV-W600DS-DL හඳුන්වා දීම | SJV-W1000 හඳුන්වා දීම | SJV-W1500 හඳුන්වා දීම | |
| මූලිකපරාමිතීන් | සංචාලන ක්රමය | ලේසර් SLAM | ලේසර් SLAM | ලේසර් SLAM | ලේසර් SLAM |
| ධාවන ප්රකාරය | රෝද දෙකේ වෙනස | ද්විත්ව සුක්කානම් රෝදය සර්ව දිශානුගත | රෝද දෙකේ වෙනස | රෝද දෙකේ වෙනස | |
| කවචයේ වර්ණය | නිල් / අභිරුචිකරණය කළ වර්ණය | RAL9003 / අභිරුචිකරණය කළ වර්ණය | නිල් / අභිරුචිකරණය කළ වර්ණය | නිල් / අභිරුචිකරණය කළ වර්ණය | |
| L*W*H(මි.මී.) | 924*758*300 (මි.මී.) | 1276*546*365 (අංක 1276) | 1224*730*420 (අඟල් 1224) | 1210*892*280 (අඟල් 1210) | |
| භ්රමණ විෂ්කම්භය (මි.මී.) | 1035 යනු කුමක්ද? | 1330 යනු කුමක්ද? | 1350 - ශ්රේණිය | 1415 | |
| බර (බැටරිය සමඟ) (kg) | 200 යි | 320 (320) | 250 යි | 250 යි | |
| පැටවීමේ ධාරිතාව (kg) | 500 යි | 600 600 ක් | 1000 යි | 1500 | |
| ජැකින් වේදිකා මානයන් (මි.මී.) | ඕ600 | 1250*510 ප්රමාණය | 1200*700 ප්රමාණයේ | 1180*860 ප්රමාණය | |
| උපරිම ජැකින් උස (මි.මී.) | 60±1 | 60±1 | 60±1 | 60±1 | |
| කාර්ය සාධනය පරාමිතීන් | අවම ගමන් කළ හැකි පළල (මි.මී.) | 898 ශ්රේණිය | 660 (660) | 870 යි | 1000 යි |
| සංචාලන ස්ථාන නිරවද්යතාවය (මි.මී.)* | ±5 | ±5 | ±5 | ±5 | |
| සංචාලන කෝණ නිරවද්යතාවය (°)* | ±0.5 | ±0.5 | ±0.5 | ±1 ±1 | |
| සංචාලන වේගය (m/s) | ≤1.67 යනු | ≤1.2 යනු | ≤1.67 යනු | ≤1.67 යනු | |
| බැටරිපරාමිතීන් | බැටරි පිරිවිතර (V/Ah) | 48/40 (ලිතියම් යකඩ පොස්පේට්) | 48/40 (ලිතියම් යකඩ පොස්පේට්) | 48/40 (ලිතියම් යකඩ පොස්පේට්) | 48/40 (ලිතියම් යකඩ පොස්පේට්) |
| සම්පූර්ණ බැටරි ආයු කාලය (h) | 10 | 8 | 6 | 6 | |
| ස්වයංක්රීය ආරෝපණ පරාමිතීන් (V/A) | 54.6/25 (අනුපාතික) | 54.6/25 (අනුපාතික) | 54.6/25 (අනුපාතික) | 54.6/25 (අනුපාතික) | |
| ආරෝපණ කාලය (10-80%) (පැ) | ≤1.5 යනු | ≤1.5 යනු | ≤1.5 යනු | ≤2 ≤2 | |
| ආරෝපණ ක්රමය | අතින්/ස්වයංක්රීය | අතින්/ස්වයංක්රීය/ස්විචය | අතින්/ස්වයංක්රීය | අතින්/ස්වයංක්රීය | |
| සැකසුම් | ලිඩාර් අංකය | 1(SICK nanoScan3/P+F R2000-HD) | 2(සික් නැනෝස්කෑන්3) | 2(SICK nanoScan3 / P+FR2000-HD + OLEILR-1BS2) | 1 (සික් නැනෝස්කෑන්3 / P+F R2000-HD) |
| පහත් ස්ථාන බාධක ගණන වැළැක්වීම ප්රකාශ විද්යුත් | - | - | - | - | |
| භාණ්ඩ අනාවරණය | - | - | - | - | |
| ඊ-නැවතුම් බොත්තම | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | |
| කථානායක | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | |
| වායුගෝලීය ආලෝකය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | |
| බම්පර්ස්ට්රිප් | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | |
| කාර්යයන් | Wi-Fi රෝමිං | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය |
| ස්වයංක්රීය ආරෝපණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | |
| රාක්ක හඳුනාගැනීම | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | |
| භ්රමණය | ● ● ශ්රව්ය දෘශ්යකරණය | - | - | ● ● ශ්රව්ය දෘශ්යකරණය | |
| QR කේතය සමඟ නිවැරදි ස්ථානය | 〇 | 〇 | 〇 | 〇 | |
| QR කේත සංචාලනය | 〇 | 〇 | 〇 | 〇 | |
| ලේසර් පරාවර්තක සංචලනය | 〇 | 〇 | 〇 | 〇 | |
| සහතික කිරීම් | ඊඑම්සී/ඊඑස්ඩී | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | - |
| යූඑන් 38.3 | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | ● ● ශ්රව්ය දෘශ්යකරණය | 〇 | |
* සංචාලන නිරවද්යතාවය සාමාන්යයෙන් රොබෝවක් දුම්රිය ස්ථානයට සංචාලනය කරන පුනරාවර්තන නිරවද්යතාවයට යොමු වේ.
● සම්මත 〇 විකල්ප කිසිවක් නැත
අපගේ ව්යාපාරය







